Calibration Modules To Solve Image Problems
OVK Framework / OES provides complete calibrations modules to help users solve the following four problems: dimensional correction, image distortion correction, multiple coordinate system integration, multiple image stitching.
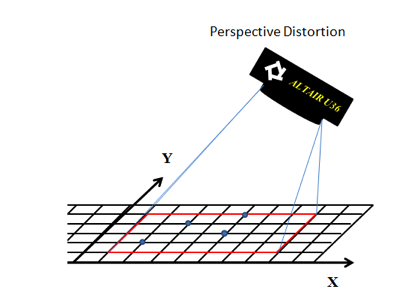
1. Size Correction : This function provides fast and accurate calculation of pixels andCorrespondence between real dimensions, even if the camera is set at a perspective Distortion or the lens has a fisheye effect (Radial Distortion) or both. The software tools that represent this feature are AxWorldMapper.
AxWorldMapper provides a short-cut for quick calibration of image pixels and physical units and external coordinate systems by AISYS proprietary nonlinear distortion calibration model. This component calibrates not only pixels with real dimension which considering perspective and lens distortion but also coordinate system transformation. The properties, methods, and events from AxWorldMapper combining with the usage of most components of OVK Framework make users quickly and conveniently measure the real dimensions of geometric shapes without extra efforts of transformation of reference system.

2. Distortion Correction
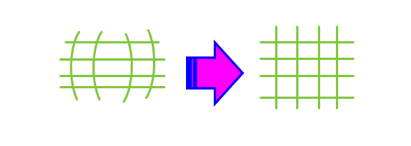
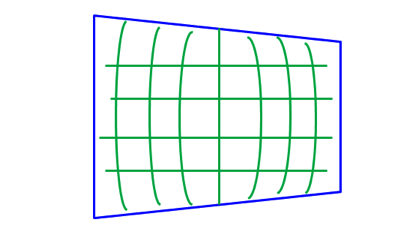
This function quickly and accurately corrects the image based on the user provided correction information. This distortion is usually caused by the camera being set up with a distortion (Perspective Distortion), or The lens has a fisheye effect (Radial Distortion) or both. This feature is available through the calibration model to help to correct distortion directly to get a distortion-free image.
The tools are AxImagePerspectiveCorrector, AxImageRadialCorrector,
AxImagePerspectiveRadialCorrector
AxImagePerspectiveCorrector This component corrects perspective distortion of images by perspective calibration algorithm and saves the result image to destination image. This component also provide the capability of online calibration which helps users to estimate parameters of perspective distortion model. Certainly, users can estimate parameters of perspective distortion model by the help of utility provide by AISYS.
AxImageRadialCorrector This component corrects radial distortion of images by radial distortion calibration algorithm and saves the result image to destination image. This component also provide the capability of online calibration which helps users to estimate parameters of radial distortion model. Certainly, users can estimate parameters of radial distortion model by the help of utility provide by AISYS
AxImagePerspectiveRadialCorrector This component corrects perspective-radial hybrid distortion of images by perspective-radial hybrid distortion calibration algorithm and saves the result image to destination image. This component also provide the capability of online calibration which helps users to estimate parameters of perspective-radial hybrid distortion model. Certainly, users can estimate parameters of perspective-radial hybrid distortion model by the help of utility provide by Innomiles
3. Multi-Coordinate System Integration: This function quickly and precisely converts different coordinate systems to each other freely according to the correction information provided by the user, and can also integrate multiple different coordinate systems into a single system. For example, multiple sets of cameras represent different image coordinate systems, and the motion platform coordinate system can be considered as another coordinate system. With proper calibration, users can easily map every pixel in multiple cameras to the exact coordinate system of the same motion platform, resulting in a tight integration of multiple cameras and motion platforms for subsequent precision inspection, measurement, positioning or processing. As mentioned in the section on “Dimensional Correction”, this software has the ability to correct for distortion, so it is easy to integrate different coordinate systems even if the camera is set up at a distorted angle (Perspective Distortion), the lens has a fisheye effect (Radial Distortion) or both. The software tools that represent this feature are AxWorldMapper, please refer 1.
4. Multi-image stitching
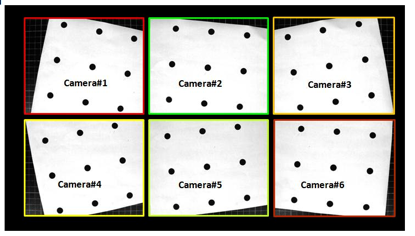
This feature easily corrects perspective skew and distortion effects based on the correction information provided by the user, and quickly and accurately stitches and “stitches” the images together based on the mathematical core of the correction. This software tool uses optical channel vision’s unique correction and image stitching algorithms to resolve all camera stance and lens effects skew and distortion at once, and to quickly and precisely produce stitching images based on the interposition of the images, achieving high stitching quality with good correction that is impossible to distinguish between image seams with the naked eye. The software tool that represents this feature is AxImageSewer.
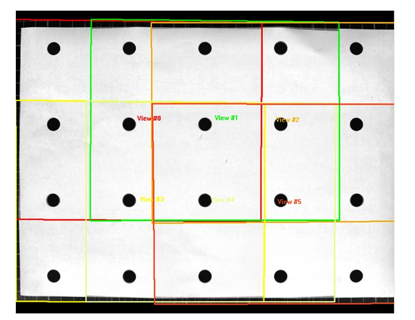
The component provides specifically capability of sewing images which based on calibration for given images which get form multi-camera. After sewing image, user can get coordinate system which is adopted by calibration coordinate, this coordinate system could be mechanical coordinate system or calibration coordinate system. User can use the sewing image to doing image processing or measuring application. Using the properties, methods, and events provided, users are able to quickly and conveniently sew images specifically.
* Used Perspective Mode (MapperMethod = AX_IMAGE_SEWER_MAPPER_METHOD_PERSPECTIVE_METHOD
[Before Sew()]
[After Sew()]
Contact with us for the further information: sales@innomiles.com

